nachdem ich nun monatelang diese Forum als Informationsquelle genutzt habe, muss ich hier ein großes Lob an die Hauptredner dieses Forums, vor allem Günter aussprechen. Ich war anfangs des Jahres auf der Suche nach einem Segway-Nachbau, fand im Netz jedoch nur Informationen, welche ein sehr großes Wissen dieser Materie voraussetzten. Als regelmäßiger Elektor-Leser und -Anwender bin ich dann auf dieses Forum gestoßen und mir war schnell klar, dass auf Grund der detaillierten Infos durch die drei Hauptentwickler ein Nachbau erfolgversprechend schien. Zwar hatte ich von Atmegas und Bascom noch keine Ahnung (ich hatte in der Vergangenheit nur mit Assembler und PICs zu tun), jedoch war die Beschreibung des Quellcodes sehr einfach zu verstehen.
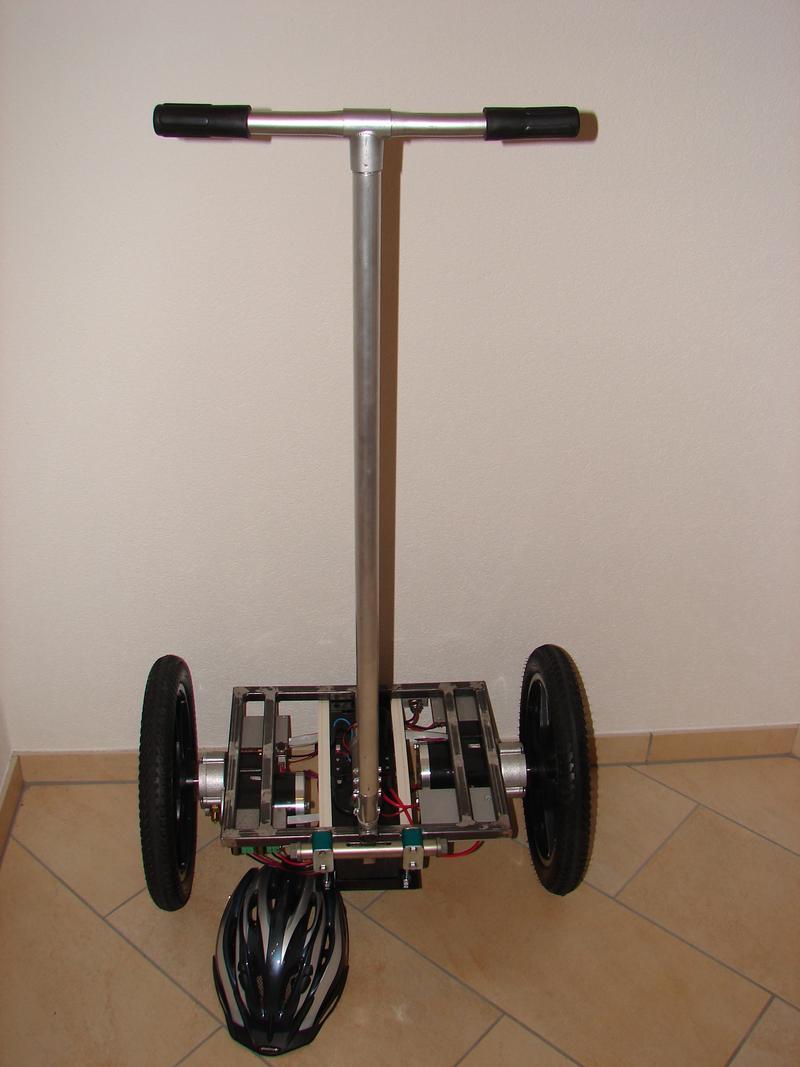
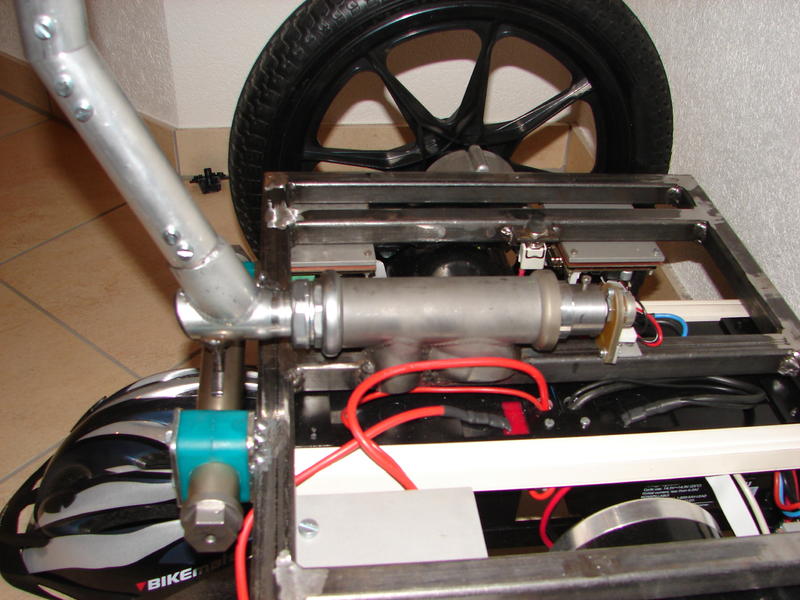
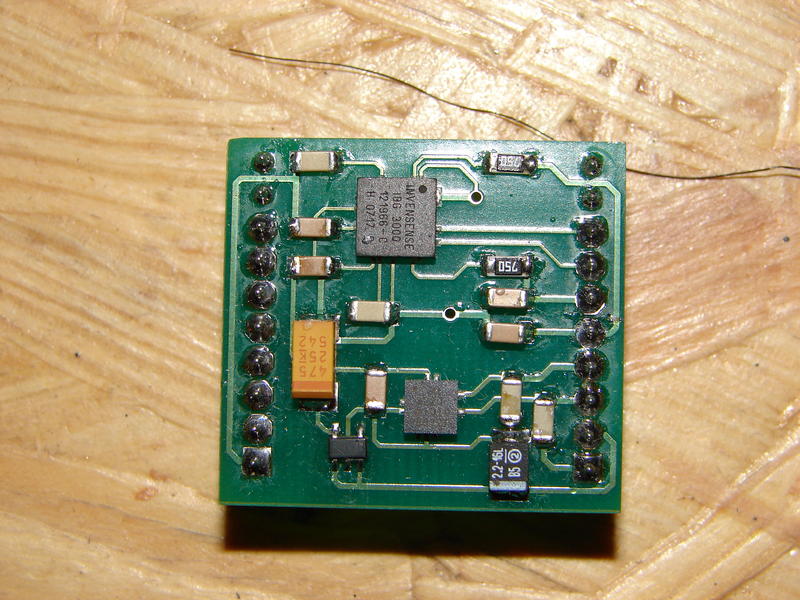
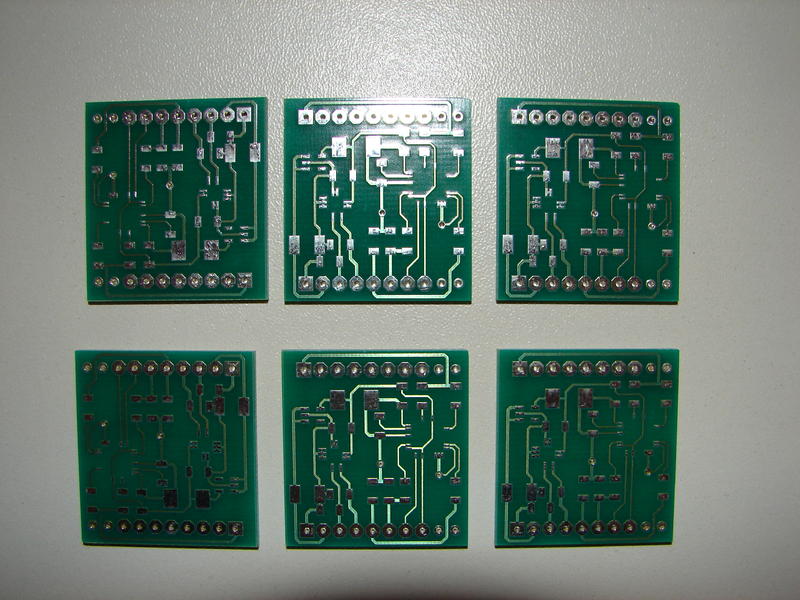
Ich habe daraufhin zuerst die Elektronik aufgebaut, mit der Firmware WOF105 programmiert und ausgiebig getestet. Erst danach konnte ich mich an den Aufbau der Mechanik wagen. Dieser erwies sich dann doch als mehr zeitaufwändig, so dass es bis letzte Woche dauerte, bis ich meine erste Testfahrt machen konnte. Konnte deshalb auch nicht am Wheelie-Treffen teilnehmen. Jetzt ist mein Wheelie soweit fertig, dass ich mich an den Weiterentwicklungen beteiligen kann und auch meine Erfahrungen an das Forum zurückgeben kann (hoffe ich zumindest). Die Telemetrie funktioniert bis jetzt nur mit Direktverbindung zum PC, d.h. da werde ich zuerst ansetzen müssen, um meine Fahrten auch auswerten zu können.
Trittblech, Schutzbleche und Verkleidung sollen dann noch folgen.

Gruß
Joachim'




 '
'